無人機多機載重與拉煙創作巨型人偶光影劇場之實踐
團隊成員
總計畫與子計畫一
總計畫共同主持人、子計畫一之主持人為羅禾淋,現為國立臺南藝術大學動畫藝術與影像美學研究所,專任副教授,曾擔任國研院智慧無人機蜂群先導型驗測專案總辦公室總工程師,是臺灣第一位用無人機創作的藝術家,長期從事科技藝術、跨領域藝術的創作。創作方面以國高中時期重度沉迷網路遊戲的生命經驗為核心,作品探討「虛擬的力量」、「速度的快感」等科技時代的異變,以網路移民世代的「移民病」為創作的主軸。作品榮獲國內外多項電子藝術節、當代藝術節的肯定,如2008、2010、2011、2015台北數位藝術獎、2009、2010、2013FILE國際電子藝術獎等競賽,並參與多個重要的國際展覽,如SIGGRAPH、SIGGRAPH ASIA、FILERIO、PIXILERATIONS〔v.8〕、ASYAAF亞洲國際青年當代藝術節、ACM Multimedia Art Exhibition、2014、2017 Ars Electronica Festival、丹麥Click電子藝術節等展覽。與多個雙年展,如2015WRO波蘭媒體雙年展、2017亞洲藝術雙年展等。是台灣第一位使用四軸無人機進行創作的藝術家,作品榮獲台北數位藝術表演獎首獎,並獲邀於Ars Electronica Festival展出其無人機跨界之作品。
子計畫一共同主持人林一平,1995年起在國立交通大學資訊工程學系任教至今,並曾經擔任該校資訊工程系系主任、研發長、資訊學院院長、副校長等職務,2014年3月起至2016年5月間擔任中華民國科技部政務次長。2019年起合聘於College of AI, NCTU,並擔任華邦電子講座。林一平的研究領域為物聯網(Internet of Things)、行動計算(Mobile Computing)、系統模擬(System Simulation)。他發展一套物聯網系統,稱為IoTtalk。這套系統被廣泛應用,發展智慧農業 AgriTalk、智慧教育 EduTalk、智慧校園 CampusTalk 等。
子計畫二
子計畫二計劃主持人龔志銘教授,現為實踐大學高雄校區資訊科技與通訊系教授,歷年研究方向為無人機群飛系統、飛行機器人系統、無人機自主飛行控制,近年來結合人工智慧與影像處理技術投身於飛行機器人系統研究領域,其相關研究開發成果計有專利8件(發明專利4件、新型專利與六級技術報告4件)、科技部研究案補助5件,書籍出版3部。近五年於無人機相關領域之研究成果參加塞普勒斯國際發明展、台灣創新技術博覽會、交通部領航盃無人機創意應用競賽與綠點子國際發明暨設計競賽等國內外重要獎項,共獲得金牌12面與銀牌3面。並擔任國防部、交通部、民航局無人機相關計畫與規範審查委員,目前亦為遙控無人機操作證學科與術科審議委員與國家考官。
總計畫與子計畫三
主持人為陳炳煇教授,陳炳煇教授於2009年當選美國機械工程師學會(ASME)會士(Fellow),這項榮譽表彰了他在生物與熱流感測器、奈米流體及噴墨印表頭等領域的卓越研究成果。他的研究貢獻廣泛且深遠,特別是在熱傳與流體現象的創新應用中展現出卓越的成就。他成功將研究成果轉化為資訊通信產品的熱管理技術,並開發出快速核酸檢測設備,顯著縮短檢測時間,對社會有重大影響。此外,陳教授於2020年榮獲第27屆東元獎(機械/能源/環境科技領域),以表彰他在熱傳與流體現象研究的突破性貢獻,以及他在推動無人機技術應用與共享平台發展中的領導角色。
子計畫四
子計畫四主持人為陳冠文,現為陽明交大資工系副教授。其研究重點為視覺定位,並應用於各類型移動式攝影機應用,如:無GPS下的無人機自動飛航、盲人導航系統等。在無人機相關研究部分,提出世界第一個可跨室內外之無人機遞送系統,成果發表於頂尖國際期刊,並獲國內多家媒體報導。對於無人機自動探索,為世界第一個將顯著目標預測應用於該領域的研究團隊,並發表多篇論文於機器人領域的頂尖國際會議。此外,亦多次指導學生參與無人機相關競賽並獲獎 (如:FIRA AIR, Taiwan, Emergency Service組 2020, 2022第一名、交通部主辦領航盃 – 無人機創意應用大賽 研發組 – 卓越獎 等)。
計畫簡述
「無人機多機載重與拉煙創作巨型人偶光影劇場之實踐」,以「無人機」進行包含「多機載重」、「動態光雕」、「群飛拉煙」三大藝術表現,結合科技之技術導入表演藝術,使得無人機可以完美應用在劇場表演之呈現。本計畫實作「無人機」的「控制」、「定位」、「通訊」等技術,讓無人機可以拉動一隻巨型人偶,甚至讓巨型人偶與觀眾互動,達到互動式科技劇場無人機與人「人機互動」的可能性。
計畫以2049人類面臨之未來為發想的起點,在地緣政治加速的當下,無人機成為戰略工具的重要節點,亦是以小博大進行不對襯戰爭的武器,整合型計畫已「無人機」為創作思考的核心,2049無人載具已經是人們生活的一部分,無人機可以是交通工具、可以是物流運輸、也可以是更多協助人類的萬能機器,讓多台無人機同步載重,透過多台無人機同時拉扯重物,懸吊一隻巨型人偶,多機協作成為可能,本計畫以投影機對巨型人偶進行動態光雕,與無人機群飛拉煙,使得動作不靈活的巨型人偶,亦有完整的展示效果,巨型人偶光影劇場,帶給觀眾對於未來有著更多的想像。
計畫除了總計畫以無人機操控懸絲人偶的整合以外,包含四個子計畫,亦是針對無人機進行技術上的開發與整合。子計畫一「無人機動態光雕與多機通訊控制同步決策」,整合無人機控制與網路通訊,並且把整合的結果應用在動態光雕技術(投影機投影在巨型人偶身上),需要無人機之座標參數之回傳,推導出動態光雕需要調整的影像位置,因此子計畫一結合無人機的控制、通訊、決策機制,並且回推給動態光雕的演算,對於多機通訊決策進行開發與整合。子計畫二「無人機載重結構與拉煙結構硬體設計整合」,結合無人機業者臺灣希望創新,開發無人機之載重結構與拉煙裝置,整合無人機的硬體,與業者共同開發適合此計畫之無人機。無人機載重技術,以拉繩加入拉力回饋感測器,知道拉力之情況,調整飛控之平衡,另外拉煙裝置也可以控制煙霧啟動的頻率與數量等。子計畫三「風場環境下無人機承載受力與飛控策略」,無人機拉繩連接荷重元感應器,並且以室內無風的情況下進行模擬試驗,並建立飛行控制的判斷機制與安全執行策略,再把其應用在室外有風的情況下,進行無人機受力飛行控制之判斷。子計畫四「無人機多機協同視覺定位系統之實踐」,以無人機內建攝影機,視覺辨識的方式,自我定位,在多台無人機同時載重的情況下,要共享位置等數據,除了RTK GPS等數據之外,亦需要讓無人機自己知道自己的位置,建立安全機制,使無人機在通訊斷線的情況下,還能穩定地進行安全機制的路徑飛行。另外無人機視覺定位亦能幫助動態光雕,讓投影之影像知道巨型人偶的位置,已進行光雕對位,透過多台無人機,以達到多座標共享的可能。
無人機巨型人偶為一齣光雕影像與巨型人偶的大型劇場,由計畫共同主持人、藝術家羅禾淋擔任總導演,進行表演的設計與編導。計畫主持人陳炳煇教授擔任技術總監,透過跨領域整合的方式,結合林一平教授、龔志銘教授、陳冠文教授等技術,打造一齣超現實的大型劇作。
備註
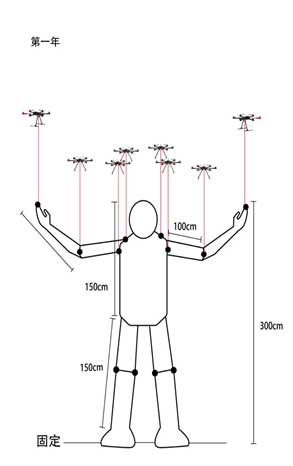
圖片一:無人機巨型人偶大型劇作的模擬示意圖
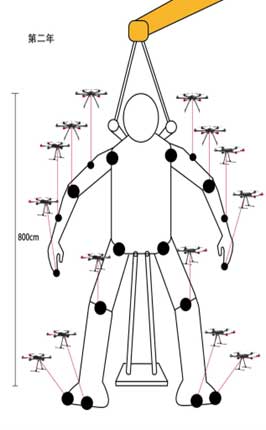
圖片二:無人機懸吊示意圖
圖片三:無人機懸吊示意圖
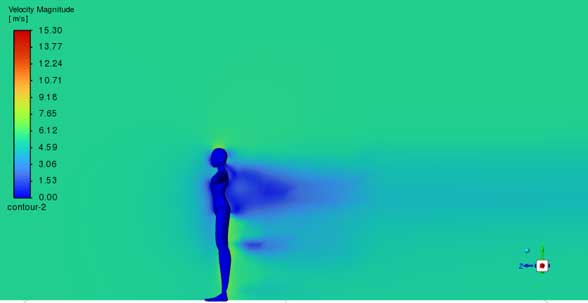
圖片四:速度輪廓圖顯示穩定狀態速度下人體模型周圍的氣流分佈。